IOSG Weekly Brief|机器人产业畅想:自动化、人工智能与 Web3 的融合进化
作者|Jacob Zhao @IOSG
机器人全景:从工业自动化到人形智能
传统机器人产业链已形成自下而上的完整分层体系,涵盖核心零部件—中间控制系统—整机制造—应用集成四大环节。核心零部件(控制器、伺服、减速器、传感器、电池等)技术壁垒最高,决定了整机性能与成本下限;控制系统是机器人的“大脑与小脑”,负责决策规划与运动控制;整机制造体现供应链整合能力。系统集成与应用决定商业化深度正成为新的价值核心。
按应用场景与形态,全球机器人正沿着“工业自动化 → 场景智能化 → 通用智能化”的路径演进,形成五大主要类型:工业机器人、移动机器人、服务机器人、特种机器人以及人形机器人
工业机器人(Industrial Robots)
当前唯一全面成熟的赛道,广泛应用于焊接、装配、喷涂与搬运等制造环节。行业已形成标准化供应链体系,毛利率稳定,ROI 明确。其中的子类协作机器人(Cobots)强调人机共作、轻量易部署,成长最快。
代表企业:ABB、发那科 (Fanuc)、安川电机(Yaskawa)、库卡(KUKA)、Universal Robots、节卡、遨博。
移动机器人(Mobile Robots)
包括 AGV(自动导引车) 与 AMR(自主移动机器人),在物流仓储、电商配送与制造运输中大规模落地,已成为 B 端最成熟品类。
代表企业:Amazon Robotics、极智嘉 (Geek )、快仓(Quicktron)、Locus Robotics。
服务机器人(Service Robots)
面向清洁、餐饮、酒店与教育等行业,是消费端增长最快的领域。清洁类产品已进入消费电子逻辑,医疗与商用配送加速商业化。此外一批更通用的操作型机器人正在兴起(如 Dyna 的双臂系统)——比任务特定型产品更灵活,但又尚未达到人形机器人的通用性。
代表企业:科沃斯、石头科技、普渡科技、擎朗智能、iRobot、 Dyna 等。
特种机器人
主要服务于医疗、军工、建筑、海洋与航天等场景,市场规模有限但利润率高、壁垒强,多依赖政府与企业订单,处于垂直细分成长阶段,典型项目包括直觉外科、Boston Dynamics、ANYbotics、NASA Valkyrie 等。
人形机器人(Humanoid Robots)
被视为未来“通用劳动力平台”。
代表企业:Tesla(Optimus)、Figure AI(Figure 01)、Sanctuary AI (Phoenix)、Agility Robotics(Digit)、Apptronik (Apollo)、1X Robotics、Neura Robotics、宇树科技(Unitree)、优必选(UBTECH)、智元机器人等。
人形机器人是当下最受关注的前沿方向,其核心价值在于以人形结构适配现有社会空间,被视为通往“通用劳动力平台”的关键形态。与追求极致效率的工业机器人不同,人形机器人强调通用适应性与任务迁移能力,可在不改造环境的前提下进入工厂、家庭与公共空间。
目前,大多数人形机器人仍停留在技术演示阶段,主要验证动态平衡、行走与操作能力。虽然已有部分项目在高度受控的工厂场景中开始小规模部署(如 Figure × BMW、Agility Digit),并预计自 2026 年起会有更多厂商(如 1X)进入早期分发,但这些仍是“窄场景、单任务”的受限应用,而非真正意义上的通用劳动力落地。整体来看,距离规模化商业化仍需数年时间。核心瓶颈包括:多自由度协调与实时动态平衡等控制难题;受限于电池能量密度与驱动效率的能耗与续航问题;在开放环境中容易失稳、难以泛化的感知—决策链路;显著的数据缺口(难以支撑通用策略训练);跨形体迁移尚未攻克;以及硬件供应链与成本曲线(尤其在中国以外地区)仍构成现实门槛,使大规模、低成本部署的实现难度进一步提高。
未来商业化路径预计将经历三个阶段:短期以 Demo-as-a-Service 为主,依赖试点与补贴;中期演进为 Robotics-as-a-Service (RaaS),构建任务与技能生态;长期以劳动力云与智能订阅服务为核心,推动价值重心从硬件制造转向软件与服务网络。总体而言,人形机器人正处于从演示到自学习的关键过渡期,未来能否跨越控制、成本与算法三重门槛,将决定其能否真正实现具身智能。
AI × 机器人:具身智能时代的黎明
传统自动化主要依赖预编程与流水线式控制(如感知–规划–控制的 DSOP 架构),只能在结构化环境中可靠运行。而现实世界更为复杂多变,新一代具身智能(Embodied AI)走的是另一条范式:通过大模型与统一表示学习,使机器人具备跨场景的“理解—预测—行动”能力。具身智能强调身体(硬件) 大脑(模型) 环境(交互)的动态耦合,机器人是载体,智能才是核心。
生成式 AI(Generative AI) 属于语言世界的智能,擅长理解符号与语义;具身智能(Embodied AI) 属于现实世界的智能,掌握感知与行动。二者分别对应“大脑”与“身体”,代表 AI 演化的两条平行主线。从智能层级上看,具身智能比生成式 AI 更高阶,但其成熟度仍明显落后。LLM 依赖互联网的海量语料,形成清晰的“数据 → 算力 → 部署”闭环;而机器人智能需要第一视角、多模态、与动作强绑定的数据——包括远程操控轨迹、第一视角视频、空间地图、操作序列等,这些数据天然不存在,必须通过真实交互或高保真仿真生成,因此更加稀缺且昂贵。虽然模拟与合成数据有所帮助,但仍无法替代真实的传感器—运动经验,这也是 Tesla、Figure 等必须自建遥操作数据工厂的原因,也是东南亚出现第三方数据标注工厂的原因。简而言之:LLM 从现成数据中学习,而机器人必须通过与物理世界互动来“创造”数据。未来 5–10 年,二者将在 Vision–Language–Action 模型与 Embodied Agent 架构上深度融合——LLM 负责高层认知与规划,机器人负责真实世界执行,形成数据与行动的双向闭环,共同推动 AI 从“语言智能”迈向真正的通用智能(AGI)。
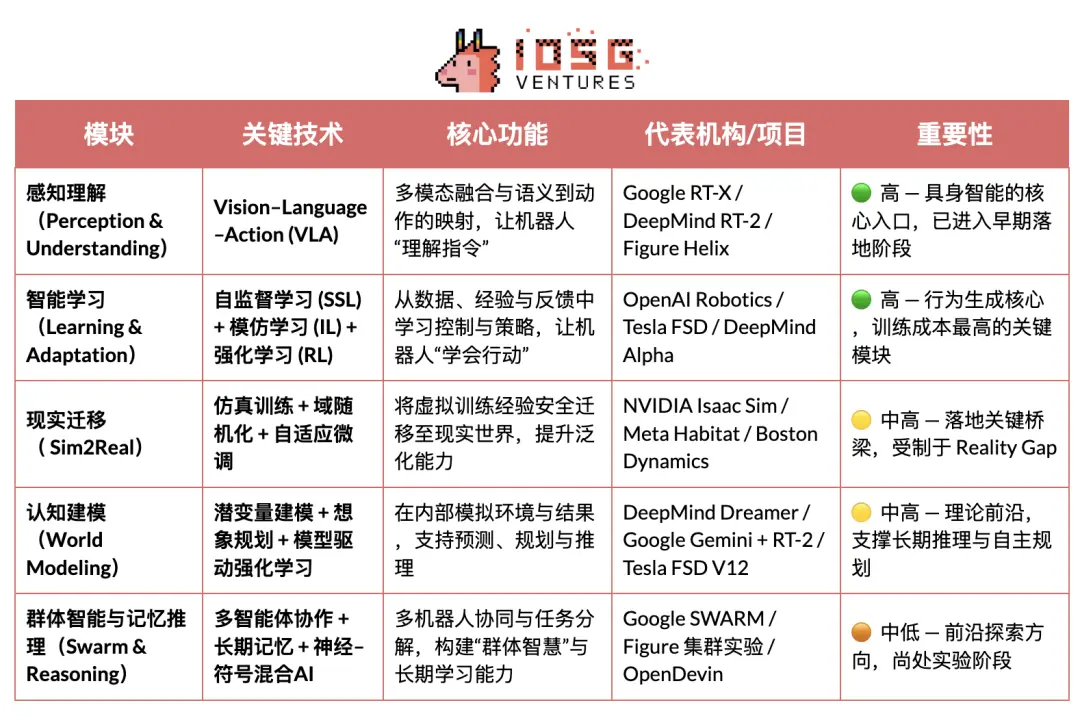
具身智能的核心技术体系可视为一个自下而上的智能栈:VLA(感知融合)、RL/IL/SSL(智能学习)、Sim2Real(现实迁移)、World Model(认知建模)、以及多智能体协作与记忆推理(Swarm & Reasoning)。其中,VLA 与 RL/IL/SSL 是具身智能的“发动机”,决定其落地与商业化;Sim2Real 与 World Model 是连接虚拟训练与现实执行的关键技术;多智能体协作与记忆推理则代表更高层次的群体与元认知演化。
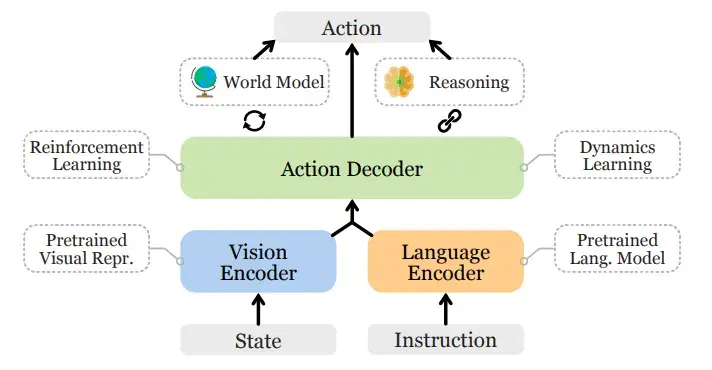
感知理解:视觉–语言–动作模型(Vision–Language–Action)
VLA 模型通过整合视觉(Vision)—语言(Language)—动作(Action)三个通道,使机器人能够从人类语言中理解意图并转化为具体操作行为。其执行流程包括语义解析、目标识别(从视觉输入中定位目标物体)以及路径规划与动作执行,从而实现“理解语义—感知世界—完成任务”的闭环,是具身智能的关键突破之一。当前代表项目有 Google RT-X、Meta Ego-Exo 与 Figure Helix,分别展示了跨模态理解、沉浸式感知与语言驱动控制等前沿方向。
目前,VLA 仍处于早期阶段,面临四类核心瓶颈:
-
语义歧义与任务泛化弱:模型难以理解模糊、开放式指令;
-
视觉与动作对齐不稳:感知误差在路径规划与执行中被放大;
-
多模态数据稀缺且标准不统一:采集与标注成本高,难以形成规模化数据飞轮;
-
长时任务的时间轴与空间轴挑战:任务跨度过长导致规划与记忆能力不足,而空间范围过大则要求模型推理“视野之外”的事物,当前 VLA 缺乏稳定世界模型与跨空间推理能力。
这些问题共同限制了 VLA 的跨场景泛化能力与规模化落地进程。
智能学习:自监督学习(SSL)、模仿学习 (IL)与强化学习 (RL)
-
自监督学习 (Self-Supervised Learning):从感知数据中自动提取语义特征,让机器人“理解世界”。 相当于让机器学会观察与表征。
-
模仿学习(Imitation Learning):通过模仿人类演示或专家示例,快速掌握基础技能。相当于让机器学会像人一样做事。
-
强化学习(Reinforcement Learning):通过“奖励-惩罚”机制,机器人在不断试错中优化动作策略。相当于让机器学会在试错中成长。
在具身智能(Embodied AI) 中,自监督学习(SSL) 旨在让机器人通过感知数据预测状态变化与物理规律,从而理解世界的因果结构;强化学习(RL)是智能形成的核心引擎,通过与环境交互和基于奖励信号的试错优化,驱动机器人掌握行走、抓取、避障等复杂行为;模仿学习(IL)则通过人类示范加速这一过程,使机器人快速获得行动先验。当前主流方向是将三者结合,构建层次化学习框架:SSL 提供表征基础,IL 赋予人类先验,RL 驱动策略优化,以平衡效率与稳定性,共同构成具身智能从理解到行动的核心机制。

现实迁移:Sim2Real —— 从仿真到现实的跨越
Sim2Real(Simulation to Reality)是让机器人在虚拟环境中完成训练、再迁移至真实世界。它通过高保真仿真环境(如 NVIDIA Isaac Sim & Omniverse、DeepMind MuJoCo)生成大规模交互数据,显著降低训练成本与硬件磨损。 其核心在于缩小“仿真现实鸿沟”,主要方法包括:
-
域随机化(Domain Randomization):在仿真中随机调整光照、摩擦、噪声等参数,提高模型泛化能力;
-
物理一致性校准:利用真实传感器数据校正仿真引擎,增强物理逼真度;
-
自适应微调(Adaptive Fine-tuning):在真实环境中进行快速再训练,实现稳定迁移。
Sim2Real 是具身智能落地的中枢环节,使 AI 模型能在安全、低成本的虚拟世界中学习“感知—决策—控制”的闭环。Sim2Real 在仿真训练上已成熟(如 NVIDIA Isaac Sim、MuJoCo),但现实迁移仍受限于 Reality Gap、高算力与标注成本,以及开放环境下泛化与安全性不足。尽管如此,Simulation-as-a-Service(SimaaS) 正成具身智能时代最轻、却最具战略价值的基础设施,其商业模式包括平台订阅(PaaS)、数据生成(DaaS)与安全验证(VaaS)。
认知建模:World Model —— 机器人的“内在世界”
世界模型(World Model) 是具身智能的“内脑”,让机器人能在内部模拟环境与行动后果,实现预测与推理。它通过学习环境动态规律,构建可预测的内部表示,使智能体在执行前即可“预演”结果,从被动执行者进化为主动推理者,代表项目包括 DeepMind Dreamer、Google Gemini RT-2、Tesla FSD V12、NVIDIA WorldSim 等。 典型技术路径包括:
-
潜变量建模(Latent Dynamics Modeling):压缩高维感知至潜在状态空间;
-
时序预测想象训练(Imagination-based Planning):在模型中虚拟试错与路径预测;
-
模型驱动强化学习(Model-based RL):用世界模型取代真实环境,降低训练成本。
World Model 处于具身智能的理论前沿性,是让机器人从“反应式”迈向“预测式”智能的核心路径,但仍受限于建模复杂、长时预测不稳与缺乏统一标准等挑战。
群体智能与记忆推理:从个体行动到协同认知
多智能体协作(Multi-Agent Systems)与记忆推理(Memory & Reasoning)代表了具身智能从“个体智能”向“群体智能”和“认知智能”演进的两个重要方向。二者共同支撑智能系统的协作学习与长期适应能力。
多智能体协作(Swarm / Cooperative RL):
指多个智能体在共享环境中通过分布式或协作式强化学习实现协同决策与任务分配。该方向已有扎实研究基础,例如 OpenAI Hide-and-Seek 实验展示了多智能体自发合作与策略涌现, DeepMind QMIX 和 MADDPG 算法提供了集中训练、分散执行的协作框架。这类方法已在仓储机器人调度、巡检和集群控制等场景中得到应用验证。
记忆与推理(Memory & Reasoning):
聚焦让智能体具备长期记忆、情境理解与因果推理能力,是实现跨任务迁移和自我规划的关键方向。典型研究包括 DeepMind Gato (统一感知-语言-控制的多任务智能体)和 DeepMind Dreamer 系列(基于世界模型的想象式规划),以及 Voyager 等开放式具身智能体,通过外部记忆与自我演化实现持续学习。这些系统为机器人具备“记得过去、推演未来”的能力奠定了基础。
全球具身智能产业格局:合作竞争并存

全球机器人产业正处于“合作主导、竞争深化”的时期。中国的供应链效率、美国的 AI 能力、日本的零部件精度、欧洲的工业标准共同塑造全球机器人产业的长期格局。
-
美国在前沿 AI 模型与软件领域(DeepMind、OpenAI、NVIDIA)保持领先,但这一优势并未延伸至机器人硬件。中国厂商在迭代速度和真实场景表现上更具优势。美国通过《芯片法案》(CHIPS Act)和《通胀削减法案》(IRA)推动产业回流。
-
中国凭借规模化制造、垂直整合与政策驱动,在零部件、自动化工厂与人形机器人领域形成领先优势,硬件与供应链能力突出,宇树与优必选等已实现量产,正向智能决策层延伸。但在 算法与仿真训练层与美国仍存较大差距。
-
日本长期垄断高精度零部件与运动控制技术,工业体系稳健,但 AI 模型融合仍处早期阶段,创新节奏偏稳。
-
韩国在消费级机器人普及方面突出——由 LG、NAVER Labs 等企业引领,并拥有成熟强劲的服务机器人生态体系。
-
欧洲工程体系与安全标准完善,1X Robotics 等在研发层保持活跃,但部分制造环节外迁,创新重心偏向协作与标准化方向。
机器人 × AI × Web3:叙事愿景与现实路径
2025 年,Web3 行业出现与机器人和 AI 融合的新叙事。尽管 Web3 被视为去中心化机器经济的底层协议,但其在不同层面的结合价值与可行性仍存在明显分化:
-
硬件制造与服务层资本密集、数据闭环弱,Web3 目前仅能在供应链金融或设备租赁等边缘环节发挥辅助作用;
-
仿真与软件生态层的契合度较高,仿真数据与训练任务可上链确权,智能体与技能模块也可通过 NFT 或 Agent Token 实现资产化;
-
平台层,去中心化的劳动力与协作网络正展现出最大潜力——Web3 可通过身份、激励与治理一体化机制,逐步构建可信的“机器劳动力市场”,为未来机器经济奠定制度雏形。

从长期愿景来看,协作与平台层是 Web3 与机器人及 AI 融合中最具价值的方向。随着机器人逐步具备感知、语言与学习能力,它们正演化为能自主决策、协作与创造经济价值的智能个体。这些“智能劳动者”真正参与经济体系,仍需跨越四个身份、信任、激励与治理核心门槛。
-
在身份层,机器需具备可确权、可追溯的数字身份。通过 Machine DID,每个机器人、传感器或无人机都能在链上生成唯一可验证的“身份证”,绑定其所有权、行为记录与权限范围,实现安全交互与责任界定。
-
在信任层,关键在于让“机器劳动”可验证、可计量、可定价。借助智能合约、预言机与审计机制,结合物理工作证明(PoPW)、可信执行环境(TEE) 与零知识证明(ZKP),可确保任务执行过程的真实性与可追溯性,使机器行为具备经济核算价值。
-
在激励层,Web3 通过Token 激励体系、账户抽象与状态通道实现机器间的自动结算与价值流转。机器人可通过微支付完成算力租赁、数据共享,并以质押与惩罚机制保障任务履约;借助智能合约与预言机,还可形成无需人工调度的去中心化“机器协作市场”。
-
在治理层,当机器具备长期自治能力后,Web3 提供透明、可编程的治理框架:以 DAO 治理共同决策系统参数,以多签与信誉机制维护安全与秩序。长期来看,这将推动机器社会迈向 “算法治理” 阶段——人类设定目标与边界,机器间以合约维系激励与平衡。
Web3 与机器人融合终极愿景:真实环境评测网络——由分布式机器人组成的“现实世界推理引擎”,在多样、复杂的物理场景中持续测试与基准模型能力;以及机器人劳动力市场——机器人在全球执行可验证的现实任务,通过链上结算获取收益,并将价值再投入算力或硬件升级。
从现实路径来看,具身智能与Web3的结合仍处于早期探索期, 去中心化机器智能经济体更多停留在叙事与社区驱动层面。现实中具备可行潜力的结合方向,主要体现在以下三方面:
(1)数据众包与确权——Web3 通过链上激励与追溯机制,鼓励贡献者上传真实世界数据;
(2)全球长尾参与——跨境小额支付与微激励机制有效降低数据采集与分发成本;
(3)金融化与协作创新——DAO 模式可推动机器人资产化、收益凭证化及机器间结算机制。
总体来看,短期主要集中在数据采集与激励层;中期有望在“稳定币支付 长尾数据聚合”及 RaaS 资产化与结算层实现突破;长期,若人形机器人规模化普及,Web3 或将成为机器所有权、收益分配与治理的制度底层,推动真正的去中心化机器经济形成。
Web3 机器人生态图谱与精选案例
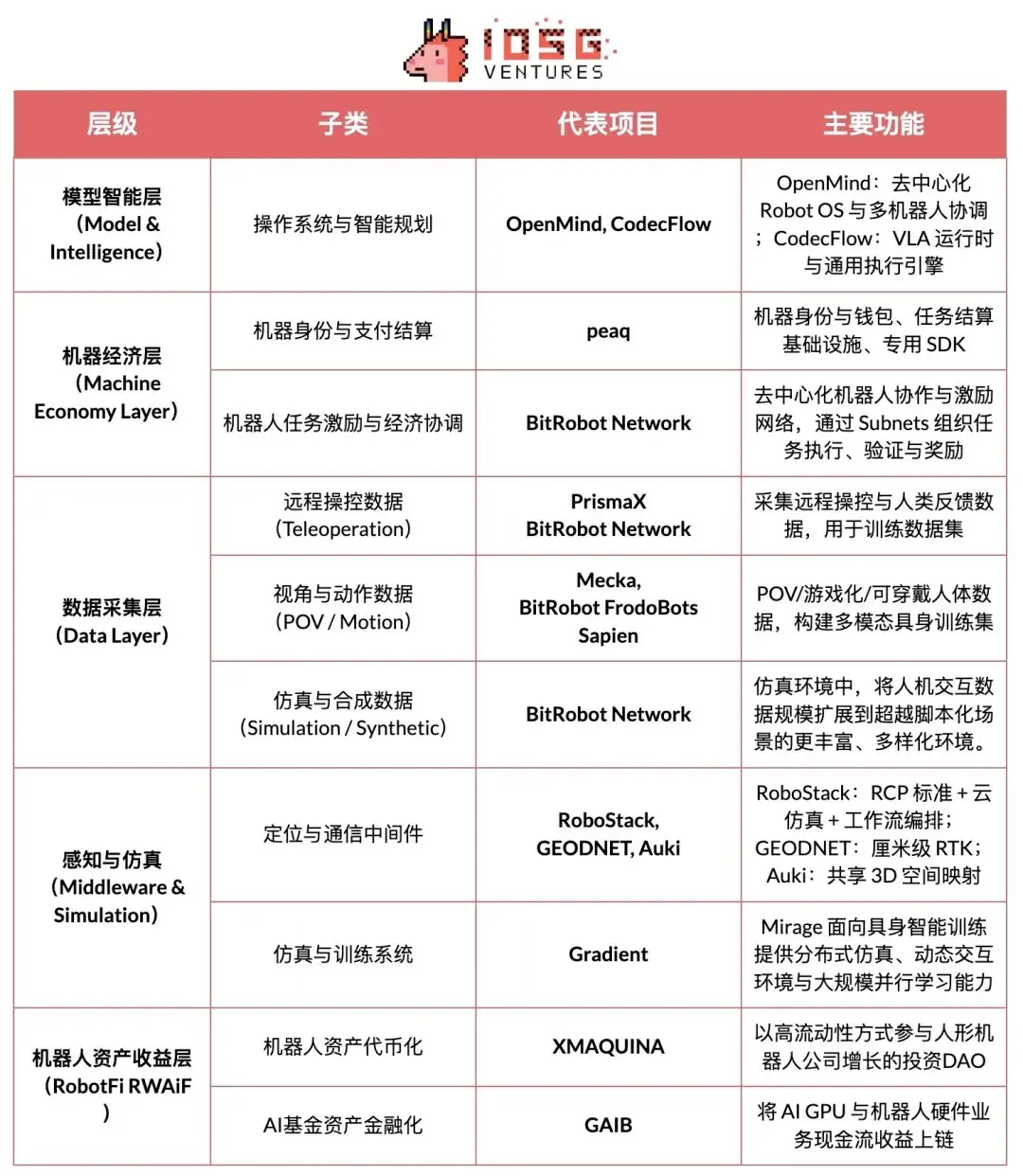
基于“可验证进展、技术公开度、产业相关度”三项标准,梳理当前 Web3 × Robotics 代表性项目,并按五层架构归类:模型智能层、机器经济层、数据采集层、感知与仿真基础层、机器人资产收益层。为保持客观,我们已剔除明显“蹭热点”或资料不足项目;如有疏漏,欢迎指正。
模型智能层(Model & Intelligence)
Openmind - Building Android for Robots (https://openmind.org/)
OpenMind 是一个面向具身智能(Embodied AI)与机器人控制的开源操作系统(Robot OS),目标是构建全球首个去中心化机器人运行环境与开发平台。 项目核心包括两大组件:
-
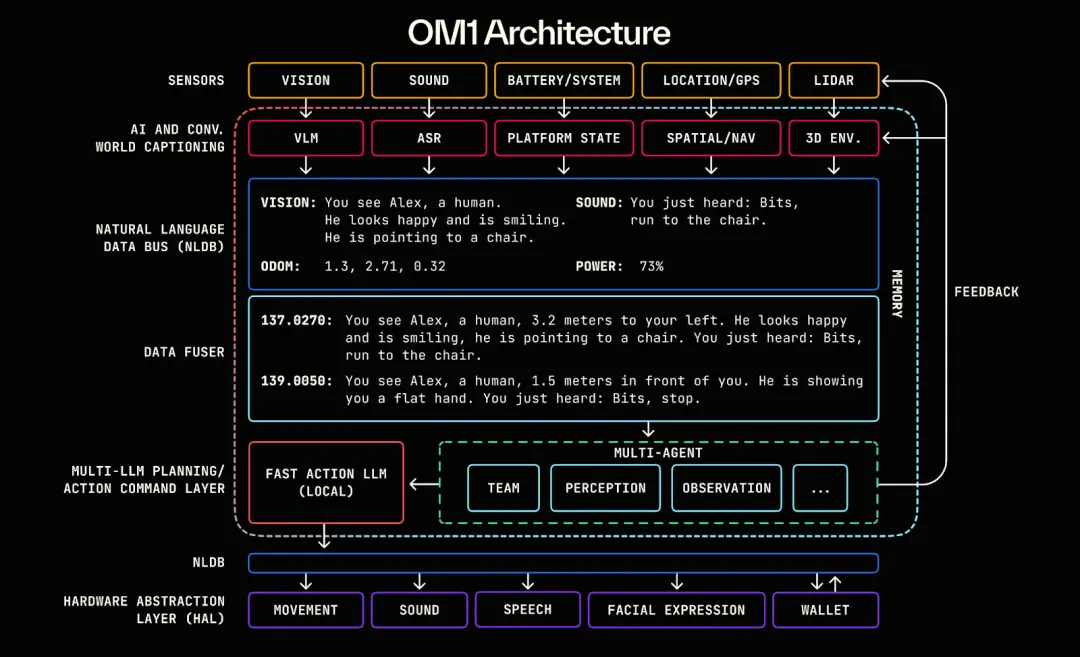
OM1:构建在 ROS2之上的模块化开源 AI 智能体运行时(AI Runtime Layer),用于编排感知、规划与动作管线,服务于数字与实体机器人;
-
FABRIC:分布式协调层(Fabric Coordination Layer),连接云端算力、模型与现实机器人,使开发者可在统一环境中控制和训练机器人。
OpenMind 的核心在于充当 LLM(大语言模型)与机器人世界之间的智能中间层,让语言智能真正转化为具身智能(Embodied Intelligence),构建起从理解(Language → Action)到对齐(Blockchain → Rules)的智能骨架。
OpenMind 多层系统实现了完整的协作闭环:人类通过 OpenMind App 提供反馈与标注(RLHF 数据),Fabric Network 负责身份验证、任务分配与结算协调,OM1 Robots 执行任务并遵循区块链上的“机器人宪法”完成行为审计与支付,从而实现人类反馈 → 任务协作 → 链上结算的去中心化机器协作网络。

项目进展与现实评估
OpenMind 处于“技术可运行、商业未落地”的早期阶段。核心系统 OM1 Runtime 已在 GitHub 开源,可在多平台运行并支持多模态输入,通过自然语言数据总线(NLDB)实现语言到行动的任务理解,具备较高原创性但仍偏实验,Fabric 网络与链上结算仅完成接口层设计。
生态上,项目已与 Unitree、Ubtech、TurtleBot 等开放硬件及 Stanford、Oxford、Seoul Robotics 等高校合作,主要用于教育与研究验证,尚无产业化落地。App 已上线测试版,但激励与任务功能仍处早期。
商业模式方面,OpenMind 构建了 OM1(开源系统) Fabric(结算协议) Skill Marketplace(激励层)的三层生态,目前尚无营收,依赖约 2000 万美元早期融资(Pantera、Coinbase Ventures、DCG)。总体来看,技术领先但商业化与生态仍处起步阶段,若 Fabric 成功落地,有望成为“具身智能时代的 Android”,但周期长、风险高、对硬件依赖强。
CodecFlow - The Execution Engine for Robotics (https://codecflow.ai)
CodecFlow 是一个基于 Solana 网络 的去中心化执行层协议(Fabric),旨在为 AI 智能体与机器人系统提供按需运行环境,让每一个智能体拥有“即时机器(Instant Machine)”。项目核心由三大模块构成:
-
Fabric :跨云算力聚合层(Weaver Shuttle Gauge),可在数秒内为AI任务生成安全的虚拟机、GPU容器或机器人控制节点;
-
optr SDK:智能体执行框架(Python接口),用于创建可操作桌面、仿真或真实机器人的“Operator”;
-
Token 激励:链上激励与支付层,连接计算提供者、智能体开发者与自动化任务用户,形成去中心化算力与任务市场。
CodecFlow 的核心目标是打造“AI与机器人操作员的去中心化执行底座”,让任何智能体可在任意环境(Windows / Linux / ROS / MuJoCo / 机器人控制器)中安全运行,实现从算力调度(Fabric) → 系统环境(System Layer) → 感知与行动(VLA Operator) 的通用执行架构。
项目进展与现实评估
已发布早期版本的 Fabric 框架(Go)与 optr SDK(Python),可在网页或命令行环境中启动隔离算力实例。Operator 市场 预计于 2025 年底上线,定位为 AI 算力的去中心化执行层,主要服务对象包括 AI 开发者、机器人研究团队与自动化运营公司。

机器经济层(Machine Economy Layer)
BitRobot - The World’s Open Robotics Lab (https://bitrobot.ai)
BitRobot 是一个面向具身智能(Embodied AI)与机器人研发的去中心化科研与协作网络(Open Robotics Lab),由 FrodoBots Labs 与 Protocol Labs 联合发起。其核心愿景是:通过“子网(Subnets) 激励机制 可验证工作(VRW)”的开放架构, 核心作用包括:
-
通过 VRW (Verifiable Robotic Work) 标准定义并验证每一项机器人任务的真实贡献;
-
通过 ENT (Embodied Node Token) 为机器人赋予链上身份与经济责任;
-
通过 Subnets 组织科研、算力、设备与操作者的跨地域协作;
-
通过 Senate Gandalf AI 实现“人机共治”的激励决策与科研治理。
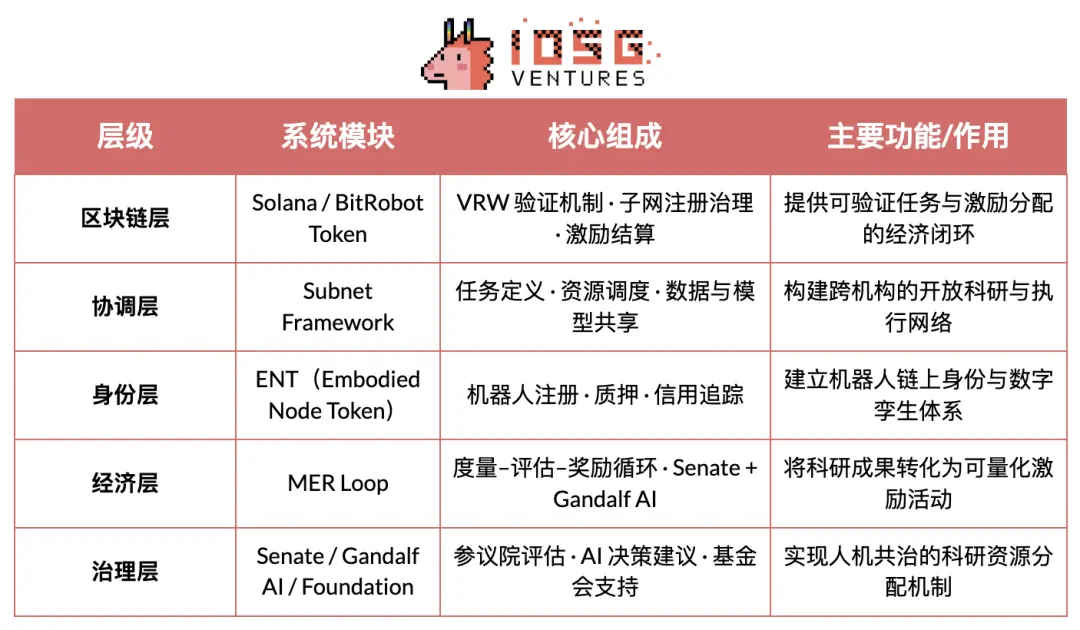
自 2025 年发布白皮书以来,BitRobot 已运行多个子网(如 SN/01 ET Fugi、SN/05 SeeSaw by Virtuals Protocol),实现去中心化远程操控与真实场景数据采集,并推出 $5M Grand Challenges 基金 推动全球模型开发的科研竞赛。
peaq – The Economy of Things (https://www.peaq.network)
peaq 是专为机器经济打造的 Layer-1 区块链,为数百万台机器人与设备提供机器身份、链上钱包、访问控制以及纳秒级时间同步(Universal Machine Time)等底层能力。其 Robotics SDK 使开发者能够以极少代码让机器人“机器经济就绪”,实现跨厂商、跨系统的互操作性与交互。
目前,peaq 已上线全球首个代币化机器人农场,并支持 60 余个真实世界的机器应用。其代币化框架帮助机器人公司为资本密集型硬件筹集资金,并将参与方式从传统 B2B/B2C 扩展至更广泛的社区层。凭借由网络费用注入的协议级激励池,peaq 可补贴新设备接入并支持开发者,从而形成推动机器人与物理 AI 项目加速扩张的经济飞轮。

数据采集层 (Data Layer)
旨在解决具身智能训练中稀缺且昂贵的高质量现实世界数据。通过多种路径采集和生成人机交互数据,包括远程操控(PrismaX, BitRobot Network)、第一视角与动作捕捉(Mecka、BitRobot Network、Sapien、Vader、NRN)以及仿真与合成数据(BitRobot Network),为机器人模型提供可扩展、可泛化的训练基础。需要明确的是,Web3 并不擅长“生产数据”——在硬件、算法与采集效率上,Web2 巨头远超任何 DePIN 项目。其真正价值在于重塑数据的分配与激励机制。基于“稳定币支付网络 众包模型”,通过无许可的激励体系与链上确权机制,实现低成本的小额结算、贡献溯源与自动分润。但开放式众包仍面临质量与需求闭环难题——数据质量参差不齐,缺乏有效验证与稳定买方。
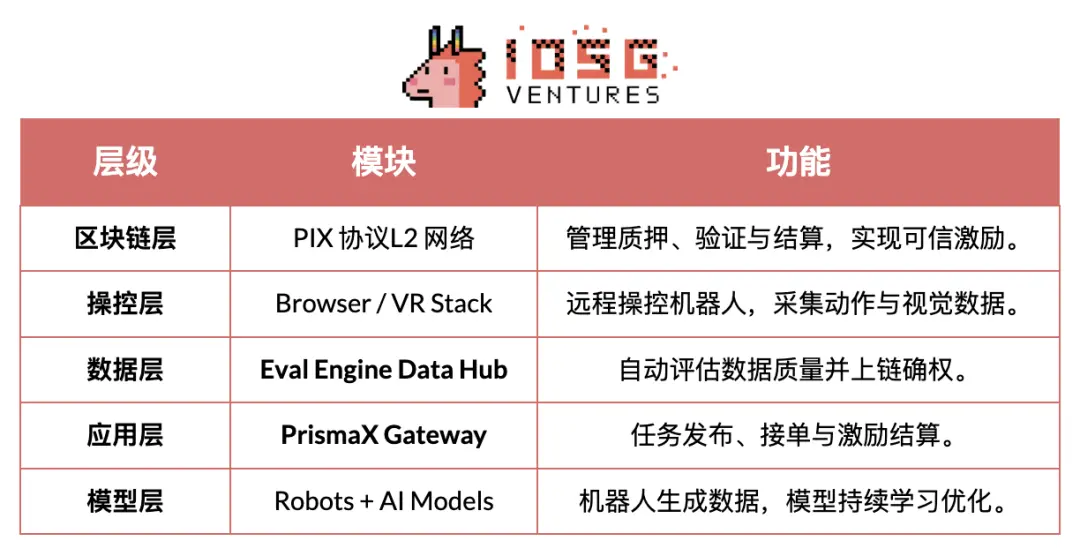
PrismaX (https://gateway.prismax.ai)
PrismaX 是一个面向具身智能(Embodied AI)的去中心化远程操控与数据经济网络,旨在构建“全球机器人劳动力市场”,让人类操作者、机器人设备与AI模型通过链上激励系统协同进化。项目核心包括两大组件:
-
Teleoperation Stack —— 远程操控系统(浏览器/VR界面 SDK),连接全球机械臂与服务机器人,实现人类实时操控与数据采集;
-
Eval Engine —— 数据评估与验证引擎(CLIP DINOv2 光流语义评分),为每条操作轨迹生成质量评分并上链结算。
PrismaX 通过去中心化激励机制,将人类操作行为转化为机器学习数据,构建从远程操控 → 数据采集 → 模型训练 → 链上结算的完整闭环,实现“人类劳动即数据资产”的循环经济。
项目进展与现实评估
PrismaX 已在 2025 年 8 月上线测试版(gateway.prismax.ai),用户可远程操控机械臂执行抓取实验并生成训练数据。Eval Engine 已在内部运行, 整体来看,PrismaX 技术实现度较高,定位清晰,是连接“人类操作 × AI模型 × 区块链结算”的关键中间层。其长期潜力有望成为“具身智能时代的去中心化劳动与数据协议”,但短期仍面临规模化挑战。
BitRobot Network(https://bitrobot.ai/)
BitRobot Network 通过其子网实现视频、远程操控与仿真等多源数据采集。SN/01 ET Fugi 允许用户远程控制机器人完成任务,在“现实版 Pokémon Go 式”的交互中采集导航与感知数据。该玩法促成了 FrodoBots-2K 数据集的诞生,这是当前最大规模的人机导航开源数据集之一,被 UC Berkeley RAIL 和 Google DeepMind 等机构使用。SN/05 SeeSaw (Virtual Protocol)则通过 iPhone 在真实环境中大规模众包采集第一视角视频数据。其他已公布的子网,如 RoboCap 和 Rayvo,则专注于利用低成本实体设备采集第一视角视频数据。
Mecka (https://www.mecka.ai)
Mecka 是一家机器人数据公司,通过游戏化的手机采集和定制硬件设备,众包获取第一视角视频、人体运动数据以及任务演示,用于构建大规模多模态数据集,支持具身智能模型的训练。
Sapien (https://www.sapien.io/)
Sapien 是一个以“人类运动数据驱动机器人智能”为核心的众包平台,通过可穿戴设备和移动端应用采集人体动作、姿态与交互数据,用于训练具身智能模型。项目致力于构建全球最大的人体运动数据网络,让人类的自然行为成为机器人学习与泛化的基础数据源。
Vader(https://www.vaderai.ai)
Vader 通过其现实世界 MMO 应用 EgoPlay 众包收集第一视角视频与任务示范:用户以第一人称视角记录日常活动并获得 $VADER 奖励。其 ORN 数据流水线 能将原始 POV 画面转换为经过隐私处理的结构化数据集,包含动作标签与语义叙述,可直接用于人形机器人策略训练。
NRN Agents(https://www.nrnagents.ai/)
一个游戏化的具身 RL 数据平台,通过浏览器端机器人控制与模拟竞赛来众包人类示范数据。NRN 通过“竞技化”任务生成长尾行为轨迹,用于模仿学习与持续强化学习,并作为可扩展的数据原语支撑 sim-to-real 策略训练。
具身智能数据采集层项目对比

感知与仿真(Middleware & Simulation)
感知与仿真层为机器人提供连接物理世界与智能决策的核心基础设施,包括定位、通信、空间建模、仿真训练等能力,是构建大规模具身智能系统的“中间层骨架”。当前该领域仍处于早期探索阶段,各项目分别在高精度定位、共享空间计算、协议标准化与分布式仿真等方向形成差异化布局,尚未出现统一标准或互通生态。
中间件与空间基建(Middleware & Spatial Infra)
机器人核心能力——导航、定位、连接性与空间建模——构成了连接物理世界与智能决策的关键桥梁。尽管更广泛的 DePIN 项目(Silencio、WeatherXM、DIMO)开始提及“机器人,但下列项目与具身智能最直接相关。
RoboStack – Cloud-Native Robot Operating Stack (https://robostack.io)
RoboStack 是云原生机器人中间件,通过 RCP(Robot Context Protocol)实现机器人任务的实时调度、远程控制与跨平台互操作,并提供云端仿真、工作流编排与 Agent 接入能力。
GEODNET – Decentralized GNSS Network (https://geodnet.com)
GEODNET 是全球去中心化 GNSS 网络,提供厘米级 RTK 高精度定位。通过分布式基站和链上激励,为无人机、自动驾驶与机器人提供实时“地理基准层”。
Auki – Posemesh for Spatial Computing (https://www.auki.com)
Auki 构建了去中心化的 Posemesh 空间计算网络,通过众包传感器与计算节点生成实时 3D 环境地图,为 AR、机器人导航和多设备协作提供共享空间基准。它是连接 虚拟空间与现实场景 的关键基础设施,推动 AR × Robotics 的融合。
Tashi Network — 机器人实时网格协作网络 (https://tashi.network)
去中心化实时网格网络,实现亚 30ms 共识、低延迟传感器交换与多机器人状态同步。其 MeshNet SDK 支持共享 SLAM、群体协作与鲁棒地图更新,为具身 AI 提供高性能实时协作层。
Staex — 去中心化连接与遥测网络 (https://www.staex.io)
源自德国电信研发部门的去中心化连接层,提供安全通信、可信遥测与设备到云的路由能力,使机器人车队能够可靠交换数据并跨不同运营方协作。
仿真与训练系统(Distributed Simulation & Learning)
Gradient - Towards Open Intelligence(https://gradient.network/)
Gradient 是建设“开放式智能(Open Intelligence)”的 AI 实验室,致力于基于去中心化基础设施实现分布式训练、推理、验证与仿真;其当前技术栈包括 Parallax(分布式推理)、Echo(分布式强化学习与多智能体训练) 以及 Gradient Cloud(面向企业的AI 解决方案)。在机器人方向,Mirage 平台面向具身智能训练提供 分布式仿真、动态交互环境与大规模并行学习 能力,用于加速世界模型与通用策略的训练落地。Mirage 正在与 NVIDIA 探讨与其 Newton 引擎的潜在协作方向。
机器人资产收益层(RobotFi / RWAiFi)
这一层聚焦于将机器人从“生产性工具”转化为“可金融化资产”的关键环节,通过 资产代币化、收益分配与去中心化治理,构建机器经济的金融基础设施。代表项目包括:
XmaquinaDAO – Physical AI DAO (https://www.xmaquina.io)
XMAQUINA 是一个去中心化生态系统,为全球用户提供对顶尖人形机器人与具身智能公司的高流动性参与渠道,将原本只属于风险投资机构的机会带上链。其代币 DEUS 既是流动化指数资产,也是治理载体,用于协调国库分配与生态发展。通过 DAO Portal 与 Machine Economy Launchpad,社区能够通过机器资产的代币化与结构化的链上参与,共同持有并支持新兴的 Physical AI 项目。
GAIB – The Economic Layer for AI Infrastructure (https://gaib.ai/)
GAIB 致力于为 GPU 与机器人等实体 AI 基础设施提供统一的 经济层,将去中心化资本与真实AI基建资产连接起来,构建可验证、可组合、可收益的智能经济体系。
在机器人方向上,GAIB 并非“销售机器人代币”,而是通过将机器人设备与运营合同(RaaS、数据采集、遥操作等)金融化上链,实现“真实现金流 → 链上可组合收益资产”的转化。这一体系涵盖硬件融资(融资租赁 / 质押)、运营现金流(RaaS / 数据服务)与数据流收益(许可 / 合约)等环节,使机器人资产及其现金流变得 可度量、可定价、可交易。
GAIB 以 AID / sAID 作为结算与收益载体,通过结构化风控机制(超额抵押、准备金与保险)保障稳健回报,并长期接入 DeFi 衍生品与流动性市场,形成从“机器人资产”到“可组合收益资产”的金融闭环。目标是成为 AI 时代的经济主干(Economic Backbone of Intelligence)
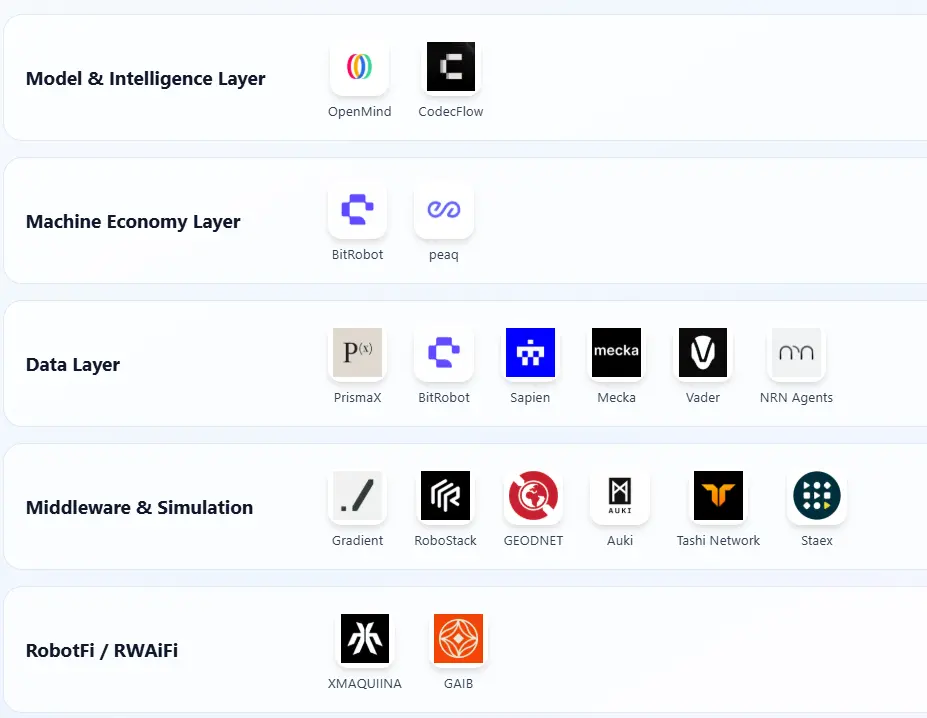
▲ Web3机器人生态图谱: https://fairy-build-97286531.figma.site/
总结与展望:现实挑战与长期机会
从长期愿景看,机器人 × AI × Web3 的融合旨在构建去中心化机器经济体系(DeRobot Economy),推动具身智能从“单机自动化”迈向“可确权、可结算、可治理”的网络化协作。其核心逻辑是通过“Token → 部署 → 数据 → 价值再分配”形成自循环机制,使机器人、传感器与算力节点实现确权、交易与分润。
然而,从现实阶段来看,该模式仍处早期探索期,距离形成稳定现金流与规模化商业闭环尚远。多数项目停留在叙事层面,实际部署有限。机器人制造与运维属资本密集型产业,单靠代币激励难以支撑基础设施扩张;链上金融设计虽具可组合性,但尚未解决真实资产的风险定价与收益兑现问题。因此,所谓“机器网络自循环”仍偏理想化,其商业模式有待现实验证。
-
模型智能层(Model & Intelligence Layer)是当前最具长期价值的方向。以 OpenMind 为代表的开源机器人操作系统,尝试打破封闭生态、统一多机器人协作与语言到动作接口。其技术愿景清晰、系统完整,但工程量巨大、验证周期长,尚未形成产业级正反馈。
-
机器经济层(Machine Economy Layer) 仍处于前置阶段,现实中机器人数量有限,DID 身份与激励网络尚难形成自洽循环。当前距离“机器劳动力经济”尚远。未来唯有具身智能实现规模化部署后,链上身份、结算与协作网络的经济效应才会真正显现。
-
数据采集层(Data Layer) 数据采集层门槛相对最低,但是目前最接近商业可行的方向。具身智能数据采集对时空连续性与动作语义精度要求极高,决定其质量与复用性。如何在“众包规模”与“数据可靠性”之间平衡,是行业核心挑战。PrismaX 先锁定 B 端需求,再分发任务采集验证一定程度上提供可复制模板,但生态规模与数据交易仍需时间积累。
-
感知与仿真层(Middleware & Simulation Layer) 仍在技术验证期,缺乏统一标准与接口尚未形成互通生态。仿真结果难以标准化迁移至真实环境,Sim2Real 效率受限。
-
资产收益层(RobotFi / RWAiFi)Web3 主要在供应链金融、设备租赁与投资治理等环节发挥辅助作用,提升透明度与结算效率,而非重塑产业逻辑。
当然,我们认为,机器人 × AI × Web3 的交汇点依然代表着下一代智能经济体系的原点。它不仅是技术范式的融合,更是生产关系的重构契机:当机器具备身份、激励与治理机制,人机协作将从局部自动化迈向网络化自治。短期内,这一方向仍以叙事与实验为主,但它所奠定的制度与激励框架,正为未来机器社会的经济秩序铺设基础。从长期视角看,具身智能与 Web3 的结合将重塑价值创造的边界——让智能体成为真正可确权、可协作、可收益的经济主体。
本独立研报由 IOSG Ventures 支持,感谢 Hans (RoboCup Asia-Pacific) , Nichanan Kesonpat (1kx), Robert Koschig (1kx) , Amanda Young (Collab Currency) , Jonathan Victor (Ansa Research), Lex Sokolin (Generative Ventures), Jay Yu (Pantera Capital) , Jeffrey Hu (Hashkey Capital) 对本文提出的宝贵建议。撰写过程中亦征询了 OpenMind, BitRobot, peaq, Auki Labs, XMAQUINA, GAIB, Vader, Gradient,Tashi Network 和 CodecFlow 等项目团队的意见反馈。本文力求内容客观准确,部分观点涉及主观判断,难免存在偏差,敬请读者予以理解。
本文在创作过程中借助了 ChatGPT-5 与 Deepseek 的 AI 工具辅助完成,作者已尽力校对并确保信息真实与准确,但仍难免存在疏漏,敬请谅解。需特别提示的是,加密资产市场普遍存在项目基本面与二级市场价格表现背离的情况。本文内容仅用于信息整合与学术/研究交流,不构成任何投资建议,亦不应视为任何代币的买卖推荐。
1.资讯内容不构成投资建议,投资者应独立决策并自行承担风险
2.本文版权归属原作所有,仅代表作者本人观点,不代表本站的观点或立场
您可能感兴趣
-
流动性危机,多头只剩「死亡排队」?
加密市场在 11 月中旬再度上演「多军死亡螺旋」。撰文:墨菲比特币跌破 10 万美元、以太坊一周跌去一成,加密市场在 11 月中旬再度上演「多军死亡螺旋」。以太坊储备第一机构 BitMine 董事长、
-
 DeFiance 创始人强烈荐文|当 VC 都在忙着追逐共识,创业者该如何应对?
DeFiance 创始人强烈荐文|当 VC 都在忙着追逐共识,创业者该如何应对?原文标题:“Build What’s Fundable”原文作者:Kyle Harrison编译:佳欢,ChainCatcher 2014 年,我刚卖掉了我的第一家公司。钱不算多,但在当时感觉像是我很
-
2025 年 Perp DEX 之战:Hyperliquid、Aster、Lighter 与 EdgeX 四分天下,谁是你的最优选择?
Hyperliquid面向专业人士,Aster瞄准零售及亚洲市场,Lighter专注技术,EdgeX聚焦机构用户。作者:Stacy Muur编译:深潮 TechFlow2025年,永续合约去中心化交易
-
当 BTC 财库公司陷入抛售循环,低质量公司或成最后赢家
坚定持币的比特币财库公司或最终胜出。作者:Cheshire Capital编译:深潮 TechFlow我想对未来6到12个月内比特币财库公司(BTC Treasury Companies,简称TC)的
-
想在 Web3 赚钱?我劝你先别急着当 KOL
别指望从公域流量里钓「漏网之鱼」。撰文:柳叶惊鸿今天先写点题外话,顺便也算感谢一下最近圈内大 V 的转发。我个人是有 X 账号的,但目前没打算在 X 上认真运营。这不是一时兴起的决定,而是反复权衡后的
-
恐慌指数跌入冰点:加密市场的「世纪大底」还是「下坠飞刀」?
历史的教训是明确的:在恐慌指数跌入个位数时选择抛售,在历史上看是错误的选择。撰文:Daii市场正在经历一场「大失血」,11 月 16 日,「加密货币恐惧与贪婪指数」 一度跌至 9,创下自 2020 年
-
比特币劫案内幕:五星级酒店、塞满现金的信封与不翼而飞的资金
一场针对矿业 CEO 的精密猎杀。撰文:Joel Khalili编译:Luffy,Foresight News复杂加密货币诈骗案件正持续增多,但鲜有案件能像今年早些时候一位比特币矿业高管遭遇的骗局那样
-
 以太坊阿根廷开发者大会精选:技术、社区与未来路线图
以太坊阿根廷开发者大会精选:技术、社区与未来路线图原文标题:《以太坊阿根廷开发者大会:迈向技术与应用的新十年》原文作者:Sanqing,Foresight News开幕式:从第一张网页到以太坊世界博览会 11 月 17 日 至 22 日,以太坊开发者
- 成交量排行
- 币种热搜榜
 泰达币
泰达币 比特币
比特币 以太坊
以太坊 USD Coin
USD Coin Solana
Solana 瑞波币
瑞波币 OFFICIAL TRUMP
OFFICIAL TRUMP First Digital USD
First Digital USD 币安币
币安币 狗狗币
狗狗币 大零币
大零币 莱特币
莱特币 Uniswap
Uniswap wETH
wETH ChainLink
ChainLink FIL
FIL CFX
CFX ZEN
ZEN OKB
OKB ICP
ICP CAKE
CAKE AR
AR ETC
ETC SHIB
SHIB DOT
DOT DYDX
DYDX